![]()
![]()
![]()
プレインを艦首ではなく、艦橋側面に取り付けるデザインもあるようだ。実際に僕がみた原潜シービュー号のモデルでも艦首にバウプレインはなく、艦橋側面に位置していた。
次に、もっとも皆さんが興味を持っておられるRCサブの内部構造だが、これも添付したイラストを参照していただきたい。防水式のRCメカ室、メインのバラストタンク、さらにメインバッテリーといった中枢メカががおわかりいただけるはずだ。ただし、これら各コンパートメントの位置はあくまでも一例にすぎず、多少アレンジしても全く問題はない。ここで誤解のないようにしていただきたいのは潜水艦のハル、つまり船体内部は機密が保たれておらずその内側と外側に数多くの穴が開けられているのが普通だということ。すなわち、水は自由に船体内外に出入りすることになる。潜行時のバラストタンクは水で満たされるし、後述するバッテリーさえ水没する艦もあるくらいで、内部が気密状態になるのはメカ室くらいだ。ただ、例として揚げたイラストのサブは、バッテリーを気密状態で使うタイプとなっている。
全体の浮力バランスを調整する特別な浮力室を持たず、船体内のあちこちに発泡スチロールや鉛のバラスト等を詰め込んでバランスさせるのが主流であり、航行中、特に潜行時にこれら船体内の構造物が水浸しになるのが最大のポイントといっていいだろう。



![]()
「プロポの電波は、水中まで届くのだろうか?」 これはRCサブに対する最も素朴な疑問ではないだろうか。
答えはイエスだが、実際は”RCサブを操縦するのに必要かつ十分な深度まで”と言うのが正確な表現かもしれない。我々は経験で3mまで電波が届く事を確認している。ただし、これは淡水に限ったものであり、海水だと含まれるイオンために電波が遮られ、制御は上手くいかない。
船体に長いアンテナを立てて水面上に出すといった必要はないが、アンテナ線はメカ室の外に出し、船体内に這わさなければならない。またこれに伴ってアンテナ線の途中でオーリングなどを用いてメカ室内外の防水を行わなければならないという事はいうまでもない。さらに、水没することになるアンテナ線の先端部も、やはり瞬着やシリコン充填剤(バスコーク等)で防水しておくべきだ。
なお大半のサブには、メインのバラストタンク制御用チャンネルにはフェールセーフ・ユニットがかませてあり、電波が届かなくなると自動的にメインタンクがブローして浮上動作に移るといったエマージェンシー機能が持たされている。
![]()
その製作で救いとなる事は、なにもサブの船体内すべてを防水する必要は全くないという事だろう。現実的な作例では船体下半分という必要最小限の部分に防水メカ室を設けてあるだけのサブが多く、この場合は船体上部内側に浮力調整用の発泡スチロールが必要に応じて詰め込まれる。
メカ室のカバーは、透明な厚手のポリカーボネイト板で作るのが一般的。気密状態を完璧に保つ為、メカ室との間にはガスケットやシリコンのコーキング剤がたっぷりと塗られ、細かい間隔で確実にネジ留めされる。内部のサーボやレシーバー等が一望できるようになっている事は、メカトラブルや浸水などの発見が早く行えるということになる。このメカ室カバー、いったんくみ上げてしまうと、めったに開けることはないようだ。一方、各バッテリー類の充電、もしくはRCメカに通電させるスイッチなど、走行ごとにかかわる簡単なルーティーン・メイテナンスは、このポリカ製メカ室に取り付けられた直径5cm位のネジ式樹脂製メイテナンスキャップを開閉することで行う、防水ゴムブーツ付トグルSWや、また最近ではマグネット及びリードSWとリレーで製作されたスイッチで非接触のため可動部が船体内にあるので防水の必要がないのが流行である。 これらは各自が工夫して取り付けている物で、前述の物は実際は廃物利用が殆どで、洗剤などの容器の蓋の部分をボトルの首の部分から切り取り、ポリカ製のメカ室カバーに開けた穴にシリコンシーラント,もしくはエポキシ接着剤等で固定するスタイルが多いようだ。
Magnetic On-/Off-Switch
![]()
皆さんはもうお気付きかと思いますが、そう、RCサブは自作部分が非常に多いのである。 しかし「気密メカ室やバラストタンクの自作はゴメンだが、絶対にRCサブは欲しい!」といわれるムキには、RCメカやバッテリー等を収納する防水メカ室と、バラストタンクを含む浮力調整用系タンクを含む浮力調整系タンクをオールインワンしたアクリルレジン製チューブの使用をお勧めする。 これがD&E Miniatures社製ののWTC(ウォター・タイト・シリンダーこれは個人輸入するしか方法が無く困難である。)、日本ではBaroque Works社のRLS(ラジオコントロール・ローディング・システム呼び名が違うだけ)で、防水処理や浮力調整系の自作で頭を悩ます必要が無く、入手したハルにポンと組み込むだけでRCサブの基本が完成してしまう。まあ、いってみればRC用の「高級大型水中モーター」といったところだ。 動力パワーにニッカドやニッケル水素バッテリーを使うケースでは問題ないらしいが、ゲル・タイプのシールドバッテリーでは、充・放電時に発生する可燃性の水素ガスに要注意。充電は風通しのよい場所で、メンテナンスハッチ等を開放したうえで行う。十分にメカ室内の水素ガスを船体外に逃がす必要がある。さもないとモーターブラシのスパークなどが水素ガスに引火し、爆発事故を起こす危険性がある。 見たことはないが、過去、この種の処理不足が原因の爆発事故がいくつかあったという。爆発の威力はかなりのもので、頑丈な防水メカ室やFRP製船体をバラバラにしてしまうほどらしい。 そうした重大な事故を引き起こさないために愛好者達はかなり気を遣っている。独立したゲル・セル室でモーターのスパークを封じ込めるサブも多い。 ところで、パナソニック製の鉛ゲル・セルには充・放電時に伴う余剰ガス排出用のピンホール部がワンウェイ・バルブ型になっているタイプもあるようだ。淡水中(海水は通電性があるため、ショートする)なら水没状態で放電させても水がセル内に逆流しないことから、メカ室外で水に浸かったまま使う例も見られる。もちろん、メーカーではこうした使用法は勧めていないが・・・・


Baroque Works製 RLS
![]()
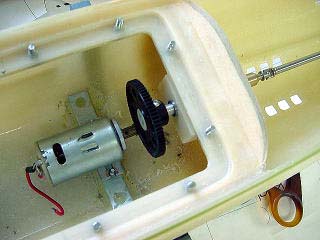
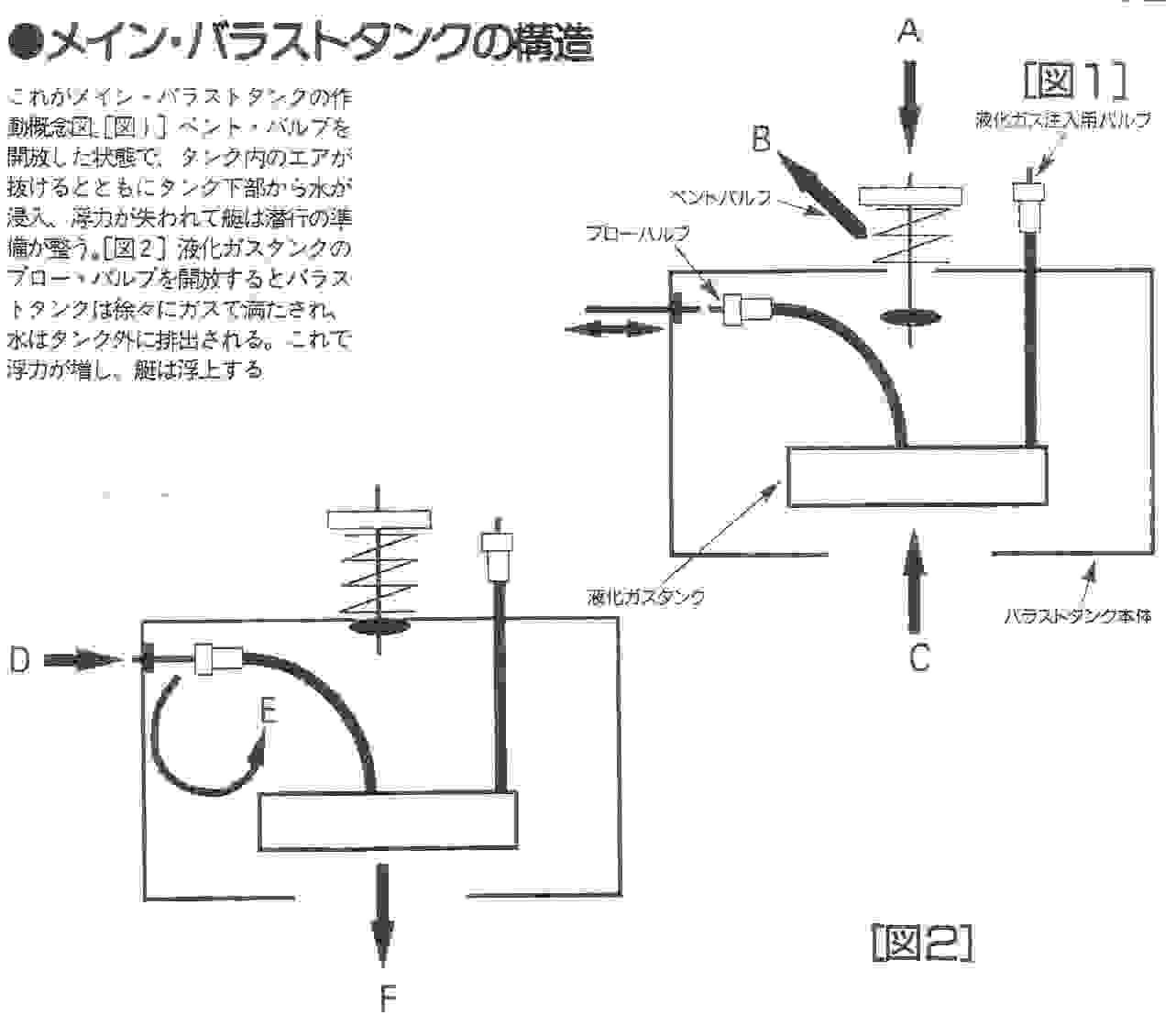
飛行機の墜落事故と同様、潜水艦では沈没の危険が常につきまとう。これは戦艦モデル等の一般的なサーフェスシップと異なるRCサブの欠点であり醍醐味でもあるわけだが、万が一、何かのトラブルでサブが浮上してこなかったとしても、けしてそのまま水中に放置しないこと。 というのも、ニッカド電池や鉛シールドバッテリーには重金属であるカドミウムや鉛が多量に含まれており、長期間水中に放置すれば、これらが水中に流出して走行場の水質汚染を起こすからである。 ファミコンなど、画面の中だけのバーチャル・リアリティとは異なり、RCホビーが最先端の科学技術を駆使して大自然にチャレンジするという性格を持っている限り、我々RCモデラーがそれらを汚すことは決してあってはならない。 さて浮力調整用のバラストタンク・システムは、もっとも皆さんが知りたいメカニズムの一つだろう。 原理は簡単だ。ひっくり返したコップを水面に浮かべたところを想像していただきたい。その上に開閉式の弁を付けたとしよう。ひっくり返したコップを水中に沈めようとしても、コップの中の空気が生み出す浮力のため、沈ませるにはかなりの力がいるはずだ。さて、ここでこの弁を開放するとどうなるかコップの自重で弁から空気が抜け、代わりにコップの下から水が流入してくることは容易に想像できる。結果的に、船底に穴が開いたボートの様に浮力を失って沈んでいくのだ。 ここで再度弁を閉じ、コップ内部にシリコンパイプなどで空気を送り込もう。コップの中に空気がたまり始め、代わりにコップから水が押し出されて浮力が生じる。バラストタンクの構造はまさにこれである。 RCサブに用いられるメイン・バラストタンクの構造を図解してみたが、もちろんタンクそのものは四角形でも良いし、ベニヤ板でハコ組しても構わない。しかし、バラストタンクの形状次第では潜航時の艦の姿勢に大きな影響を与えます。たとえば細長いタンクの場合、潜航時にダウンを打って前傾になった時、タンク内では水が前側に集まり空気は後方に集まります。すると重心は前に、浮力の中心点は後方に移動するため姿勢は大きく崩れて水中に没します。この時、潜舵は殆ど効かず、水深が浅いと水底に激突しますこの事から考えると、重心と浮力中心点の変化が少ない形状は球状と言う事になります。実際には図のようなアクリルレジン製の透明チューブが用いられることが多いようだ。チューブの両端はキャストレジン等で制作しバスコークで塞いだものや、オーリングによる気密を保持するものが多い。この部分にはさほど圧が加わらない為接着強度は大した問題ではない。 チューブの下方には穴が開けられており、水中に向けて大きく開口しているここから水が出入りする。ベント(換気)バルブとしてはチューブ上方に小さな穴が開けられており、スプリングでこの穴にゴム製バルブが押しつけられる。つまり栓である。外側からこの部分をサーボで押せばベント・バルブはメインタンク内の空気をタンク外にベンチレーションするためのものだ。ベント・バルブスプリングには真鍮やゴムバンドなど、水に浸かっても錆びない素材で作られている。 液化ガス用タンクは、銅パイプや真鍮等を高温ロウ付けしたタイプが一般的だ。タンク内のガス注入やブロー・バルブの弁は、自転車や自動車タイヤ用バルブが好適だ。これなら液化ガス内の圧力を保つことのできるし、バルブをサーボで押せば圧力を逃がすこともできるのだ。
![]()
メインタンク内にある、ブロー・バルブ押すプッシュロッドがタンクを貫通する部分はエアーが漏れないようにオーリングでシールする必要もあるが、スクリュウシャフト部分ほど神経質にならなくてもいい。 代替えフレオンガス、または同様の気化圧を持つ液化ガスを圧力源として使う場合、ブロー・バルブと液化ガス用タンク間はポリウレタンチューブで繋ぐのが普通である。液化ガスは必ず不燃性ガスを使用すること、間違って可燃性ガスを使用すると、もしガス漏れを起こすとモーターブラシのスパークであなたの艦は内部爆発で轟沈だ。 炭酸ガス(Co2)を圧力源とするケースでは、炭酸ガスの気化圧が代替えフレオンガスより非常に高いことに注目。圧力を下げるレギュレーター、高圧に耐える炭酸ガス/ガスパイプが必要になる。炭酸ガス・システムはハードウェアーに要求するファクターはとたんに多くなるのだ。 ただ、ソーダー水の原料である炭酸ガスはランニングコストが安く環境に優しい利点を持っている。その他の圧力源としては電動コンプレッサーをメカ室に組み込み艦橋にシュノーケルを介して浮上航行中にリザーバータンクへ与圧する方法があるが、全く実艦と同じシステムであるがかなりの大型艦でなければ不可能だ。 それにしても高圧ガス、くれぐれも事故には注意していただきたい。
また双方を一度に開ける必要はない。だから1個のサーボでベント・バルブを交互に開閉できるようにしておけばいい。もちろんニュートラルでは両バルブともクローズ状態となる。 液化ガスを圧力源として使うことの利点はもう一つある。 まず液化ガスタンクを満タンにする。その比重は空気よりもずっと大きい。つまり重いのだ。メイン・バラストタンクをベント・オープンしてバラストタンク内に水を満たすが、ここでわずかに艦が沈む程度に浮力バランスを発泡スチロール等で微調整しておく。当然、メインタンクのブローの繰り返しで液化ガスの残りが少なくなってくると、液化ガスタンク内は液化ガスではなく比重の小さな、つまり液化ガスより軽くて浮力を生じる気化ガスで占められるようになってくる。 この状態では潜行すべくメインタンクを水で満たしたとしても、空になりかけの液化ガスタンクそのものが浮力タンクとなり、艦が沈もうとしなくなってくる。つまり、ベント・オープンして潜行させようとしているにもかかわらず沈まないということは、ブロー用のガスタンクが空になりかけているという危険信号にもなるのだ。だから走行前に入念に浮力の微調整を行えば、液化ガスが空になると同時に潜行できないというわけ。 いわば電気を使わない、非常に有効なフェルセーフといえる。
![]()
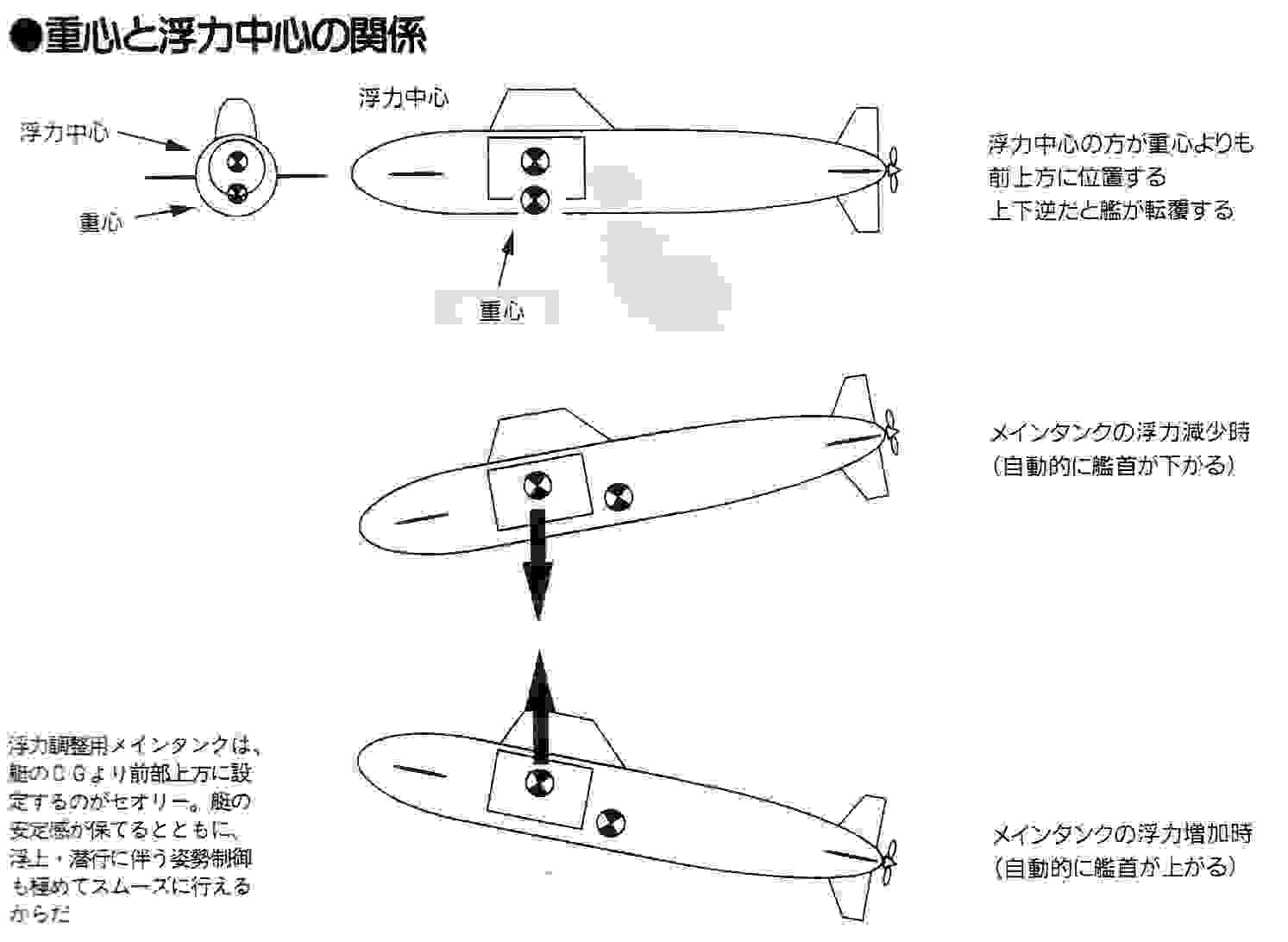
バラスト・タンク内蔵・タイプのサブにとって重心の位置決めはもっとも重要なもの一つだ。
バラストタンクとの浮力中心と、船体自体のバランスも大切なファクターだ。艦の上下方向では、バラストタンクの浮力中心が艦の重心位置よりできる限り上方が良い。もし逆に浮力中心が重心よりも低い位置になってしまうと、潜行中にタンクをブローした際、艦が転覆してしまう可能性がある。できる限り重量物は艦底側に積んで重心を下げることだ。
一方前後方向でも浮力中心と重心を一致させたい、こうすることで水中停止(ホバリング)を可能にする。重心位置がずれていると深度の調整等、操艦が難しくなるのだ。
重心の決め方だがまず,紐なとを使って重心の位置を見つける。次に初期重心位置に印を付けて、ハル内部のバラストタンクを見ます、重り等を入れて重心位置がバラストタンクの中央になるようにするのだ。 重心が決まったら水上での浮力の調整する。艦首が沈むようであれば、艦首上部ハルの内側裏面に発泡スチロール等を付けて 浮力をつけさせよう。艦尾が沈むようであれば、艦首同様に浮力をつけさせよう。決しておもりを反対側に足して重心を狂わせないようにするのだ。
![]()
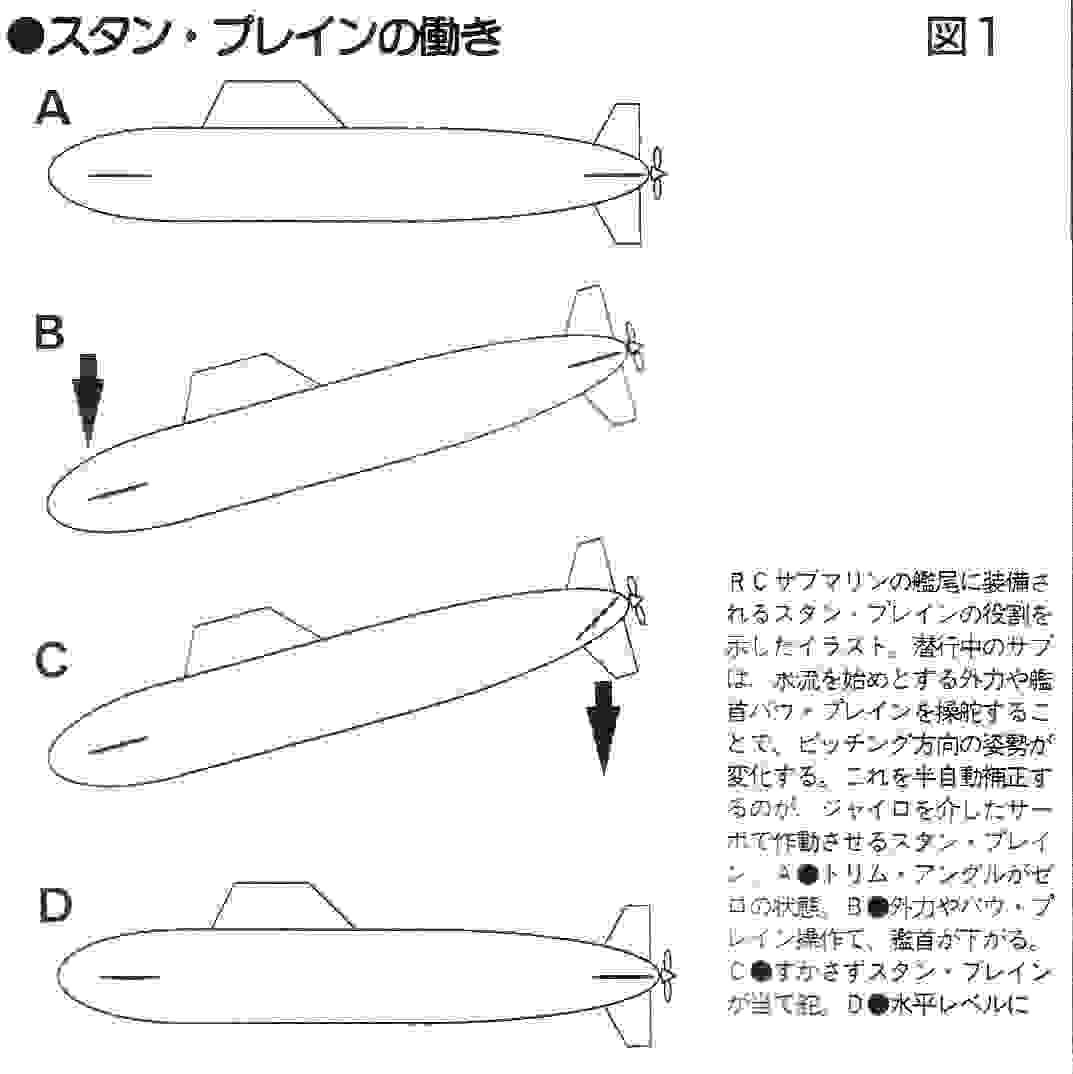
「姿勢制御」といっても、実際にRCサブマリンで問題になるのは、潜航中におけるピッチング方向の角度調整ということになる。 これには艦尾のスタン・プレインと、それを動かすサーボ・モーターに接続されたピッチコントロール・システムを用いて半自動でコントロールする方法が一般的だ。 それでは、艦首バウ・プレインは何のために付いているのか?それは潜航中の深度そのものを調整する働きを担っている。 図を見ていただこう。 例えばトリムアングル・ゼロと送信機から設定したケースで水流などの外力や艦首バウ・プレインの角度変更などで艦が下方に傾いたしよう。すると、すかさずピッチコントロール・システムがピッチング方向の角度変化を察知し、スタン・プレインを作動させるサーボにトリムアングルがゼロとなるよう自動的に当て舵を打たせるのだ。これは、例え艦首バウ・プレインの角度をアップにしてもダウンにしても同じことだ。 艦がどのような状況になろうとも、艦尾のスタン・プレインは送信機の介して命令された艦のトリムアングルを忠実に維持するのである。 実際のオペレーションでは,浮上から潜行に移るときはトリムアングルをダウン、すなわち艦首が下がるように、潜行から浮上ではその逆にトリム・アップするのが一般的だ。もちろんトリム・ゼロのままバウ・プレインを下げれば、艦首を下げずに水平状態を保ちながら深度を下げていく。 RCサブの潜行をビデオを見ると、ちょうど水族館の大水槽を泳ぐ大魚と見間違うような印象である。 この様に艦尾スタン・プレインで潜行角度を調整、艦首バウ・プレインで深度そのものを操るのが、RCサブの基本コントロールだ。 メイン・タンクを調整、浮力バランスをゼロとしたうえで、前進させながら艦首バウ・プレインを下げれば深度が下がり、逆にバウ・プレインに操作すれば、深度を上げることができる。艦の姿勢は艦尾スタン・プレインの自動制御に任せておけばいいのだ。 もちろんピッチコントローラーによる半自動制御なしでも潜行させる事は可能だが、ピッチコンでコントロールされるスタン・プレインがあった方が艦の姿勢制御や深度コントロールは、はるかに容易かつ正確な物になるは明らかだ。 艦尾スタン・プレインでコンロールされるピッチング方向の潜行トリム角度半自動制御には振子を用いたボリュームやフォトセンサー等で制御される。当クラブの重鎮で、副会長でもあるNagata氏が製作されている、HONN MODEL CRAFT KOBEのAuto PitchControl【HLC-04型】がそうである海外ではサブテック社のAutomatic Leveling ControlのAPC-4やThor DesignのPC-2 Intelligent Pitch Control等がある。 さて、ある程度以上の深度まで潜ってしまうと、操縦する地上からサブマリンの姿勢を捉えることは困難になってしまう。 ここで重要になるのが、航行深度に関してはマニュアルでコントロールするしかなかった。そこへサブテック社から圧力センサーを応用した新製品、オートマティック・ディプス・コントロール(自動深度調整装置)が登場する。これはバウ・プレインに接続することになる。



![]()
RCサブの製作で、バラスト・タンクと並んで難しいとされるのが、スクリュー・シャフト取り出しの部の防水方法。これにはラバー製のオーリングを用いた方法が広く用いられてきた。 代表的な商品はインチ・サイズであるが、サブテック社からRCサブマリンモデル専用に製作されたオーリング式防水パーツが発売されており、これを用いるのが手っ取り早いと思われる。またサブモデラーの多くは、ホームセンターや東急ハンズ等で入手可能な汎用オーリングの中からスクリュウー・シャフトにマッチしそうなサイズを探し、これをモディファイして上手く使っている。もちろん価格的にもリーズナブルである。 その加工方法を図示しておこう。 図のように内側を斜めに加工したオーリング・ハウジングキャップで締め込むことでスクリュー・シャフト側にオーリングが押しつけられる形となり、防水がおこなわれる。これに摩擦を軽減できる程度のグリスを併用すれば、オーリングに欠け等の劣化がなければ、防水そのものはオーリングだけで何ら問題ない。 このへんは操舵系出力軸の防水にも応用できる。工作用に旋盤が必要になるのが難点といえば難点だ。 ちなみに、このハウジングをモディファイせずにそのまま用いると、オーリングはシャフト内径位まで大きくなってしまう、下手をするとオーリング内径がスクリュー・シャフト外径より大きくなってしまい、ガバガバの状態で浸水が止まらない事態を招くことにもなりかねない。十分な注意が必要だろう。 しかしながら、Oリングの締加減で消費電流が倍以上ちがいます。 そこで登場するのが神戸サブマリンクラブのオリジナルシールなるものです。 最低寸法はφ4mmからしかないのですが、ほとんど点接触で外から圧力がかかる程 シールが締ます。詳しくは入会されたメンバーにサポートしております。 余談だが、世界的なレベルで見ると様々な法的規制のおかげか、日本国内では企業間の価格競争にさらされていない商品が多く、私達はまだまだ高い買い物をさせられているケースが多い。そこで私達は海外との取引もおこなっているので、個人輸入のお手伝いも可能です。
![]()
船体(ハル)アメリカで豊富に揃っているグラスファイバー製のハル・キットを用いるのが手っ取り早い。 また、大抵の艦は設計計画書と呼ばれる「モデリング・プラン」も市販されているから、それを購入してシコシコ自作しても良かろう。 さて、フル・アクションのRCサブのコントロールだが、これは①ラダー、②スピード・コントロール、③艦首バウ・プレイン(深度調整用)、④艦尾スタン・プレイン(ピッチング方向の潜行トリム角度調整用潜舵で、ピッチコントローラーによって半自動制御)、そして⑤浮力調整用メイン・バラストタンクのベント及びブロー・バルブ開閉、等で計5系統の動作に各々独立したチャンネルをあてがわなければならない。 実際の潜行手順を解説しよう。 まず、バラストタンク用チャンネルでベント・バルブをオープン。艦外の水をタンク内に満たすと、艦は浮力を失ってウォーターラインは上昇する。そして、ちょうど浮力バランスがゼロになったあたりでベント・バルブを閉じる。 この状態で前進しながら、艦首バウ・プレインを潜行方向に下げると潜り始める。その際、艦のピッチング方向の角度、つまり潜行角度は、艦尾スタン・プレインのチャンネルで操作する潜行トリムの角度によって決定される。例えばトリム・ゼロ(水平状態)にしておけば、バウ・プレインをフル・ダウンしても、ピッチコントロールの働きで艦が水平を保つように艦尾のスタン・プレインに当て舵が打たれ、艦の長軸は水平を保ったまま潜行していくことになる。もちろん、急速潜行したいときはトリム角をダウンs、艦首を下げれば合理的だ。 また深々度からトリムをアツプにして艦首を上げ、さらにメイン・タンクをブローして艦自体の浮力を上昇させながらモーターにフルパワーをかけて急速浮上させれば、実艦の如く水面上にジャンプさせることも可能だ。またモーター停止中にメイン・バラストタンクで浮力を調節すれば、停止した状態で浮いたり沈んだり水中停止も可能である。へりのホバリングほどではないにせよ、巧みに艦をバランスさせながらコントロールする感覚は、それに近いといっていいだろう。 実艦では艦長の命令の下、個別のクルーが艦を操って潜行・浮上を行うのに対して、RCサブではたった一人で操艦してしまおうというのだから、例え航行速度がスケールスピードでゆっくりだとしても、なかなか忙しい。
![]()
5Ch以上であれば一般的な送信機でコントロール可能だが、パワー系の制御チャンネル以外にピッチング方向のトリム制御スタン・プレイン、加えて別Chで深度調節用艦首バウ・プレインも操らなければならない。そんなわけで昨今のコンピュータープロポなどでミキシング等を有効に使うのもいいかもしれない。操縦はボートというよりはグライダーか何かを操っている感覚に近いかも知れない。立体的な操舵系が加わるだけで操縦はスリリングなものになる。 潜望鏡深度を保ちながら、艦影を水面に揺らめかせながら眼前を通過する美しさは格別だが、この一連のコントロールがまた難しい。そこで断言してしまおう、RCサブはスポーツであると。 さて、以上がRCサブ建造に必要となる基本的なノウハウだ。もちろん、この他にも細かなテクはあるが、後はモデラー諸氏がトライ・アンド・エラーしていただきたい。艦を一隻完成させるには1年以上費やす等はざらである。 難しい事は何もない。すべては、あなたがRCサブマリン・モデリングに一歩を踏み出すか否かにかかっているのだ。
文章はラジコンマガジンより抜粋
【戻る】